
KELO Robotics GmbH
Project dates
Full title of the project:
Reducing infection rates in care facilities and crowded public areas by means of mobile robots carrying a battery of UV-C lamps
Short name of the project:
ARODIS (Autonomous robots for disinfection)
Date of the award:
27/06/2020
Project duration:
8 weeks
Company:
Kelo Robotics GmbH
Country:
Germany
Company Website:
http://www.kelo-robotics.com
Overview:
- 99.9% disinfection of SARS-CoV-2 of a room in 4 minutes
- 100% autonomous navigation and disinfection of halls, corridors and rooms
- Lamp control that automatically turns off UV-C lamps when a person is detected
- Omni-directional and back-drivable platform
- Programmable disinfection tasks
- 4h+ operating time
SARS-CoV-2 is one of the most infectious viruses that has struck human kind since the Spanish flu one hundred years ago. The rapid spread of the SARS-CoV-2 virus has been promoted by two aspects: a) People who carry the virus are infectious long before the first symptoms of COVID-19 appear, b) the aerosols emitted by an infected person through coughing or sneezing can remain in the air for hours and infect other people. This applies in particular to situations in which dense crowds are in closed rooms. As the outbreak in Heinsberg (Germany) has shown, one infectious person can infect hundreds of other people.
UV-C light has proven to be a very effective means for preventing the transfer of germs. UV-C light massively damages the DNA or RNA of germs and thus prevents their further spread. It has been shown that if a contaminated surface is illuminated with sufficient intensity and for a sufficient period of time, UV-C light can kill up to 99.99% and more of the germs on the surface. UV-C lamps are therefore already used in clinical environments for disinfection of sickrooms or sickbeds.
Unfortunately, UV-C light can cause considerable irritation to human skin and eyes over almost the entire range of its possible wavelengths (180 – 280 nm). Therefore, when UV-C light is used for the disinfection of a room, humans have to leave the room in order not to be harmed. Only a very small range of the total wavelengths of UV-C light was found to be safe for the human skin and eyes, namely UV with a wavelength of 222 nm (Welch et al. 2018). 222 nm UV light cannot penetrate the human epidermis and the cornea of the human eye. Unfortunately the availability of such UV-C lamps and LEDs is highly limited. UV light with a wavelength of 254 nm is relatively safe for the human skin because only 95% are absorbed by the outer dead layer of skin (Nardell et al. 2008) but may still harm the human eye.
We propose a fleet of autonomous mobile robots, which will carry a battery of 6 or more 254 nm UV lamps (due to the lack of 222nm UV lamps) and will move around a public environment and expose surfaces in the environment with 254 nm UV light with doses of 0.4 – 10 mJ/cm². At such doses the survival rate of germs is between 0.1 and 0.01%. Current publications (Heßling et al. 2020, Bianco et al. 2020) suggest a 3-log or 99.9% reduction of SARS-CoV-2 with a dosis of 3.7 mJ/cm².
Our robots have two unique properties: a) they are inherently safe, omnidirectional and have a high maneuverability, which enables them to move in narrow space and in close proximity to humans; b) they are cost-efficient. Our solution will cost two thirds of the price of the systems on the market.
A true challenge for our solution and all disinfection robots with UV-C lamps is the health risk. The Directive 2006/25/EC put significant limit to the amount of UV-C light irradiated on the human body, which holds even for the promising 222nm solutions. We address this problem by tracking persons in the proximity of the robot and adjusting the UV-C light doses accordingly. A person detection system based on four RGB cameras has been developed. It is located on the top of the robot. All together the cameras form a 360° field of view. The detection system exhibits state of the art machine learning approaches for object detection in order to detect persons. The lamp control module will automatically turn off the lamps which are in the same direction as the detected person. In this way overexposures of humans are avoided. The robot can operate in presence of humans – which is necessary to in large public buildings.
A careful requirement analyses with hygienic exerts of hospital Stiftung Kreuznacher Diakonien (SKD) has been conducted. Three main use cases have been identified:
- Disinfection of the entrance halls. This a risky location for infection because many patients, employees from the care personal as well as visitors will cross this location.
- Disinfection of corridors. Corridors e.g. in wards are a frequently shared locations by different persons.
- Disinfection of patient rooms. This is performed when a new patient gets a room. Thorough disinfection is in particular required, if the previous patient was infected.
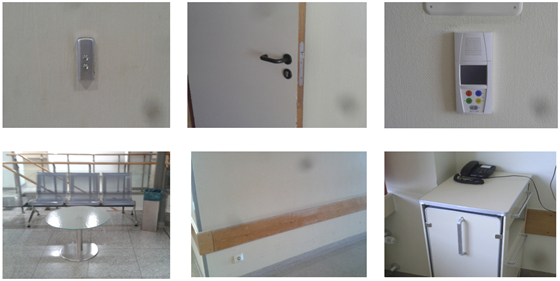
All use cases have in common to either disinfect points of interest like elevator buttons or door handles or to disinfect along contours such as handrails. The first two use cases can only be served by a robot that can operation in presence of humans – like The ARODIS robot. Other existing UV-C robot solutions do not foresee that.
Within the scope of the ARODIS project three prototypes has been developed tested in a university (University Bonn-Rhein-Sieg in Sankt Augustin) as well as in a target environment, the hospital Stiftung Kreuznacher Diakonien (SKD).
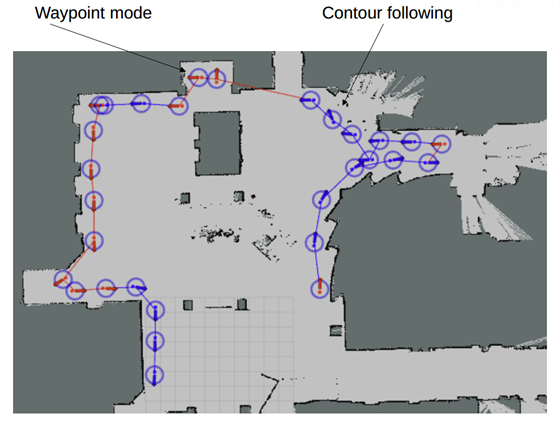
With the insights from the test runs in the target environment an disinfection algorithm has been developed to perform disinfection tasks. Such a task is a hybrid plan i.e. it can contain any combinations of the behaviors: contour following, way point navigation and stand still actions for longer UV-C exposures.
A disinfection task is designed to disinfect the target environment in one sweep. The desired dose is an input parameter to a disinfection task. The dose will be calculated from the desired log level reduction for COVID-19. In turn, this will lead to different velocities for contour following and stand still times.
An internal coverage map is maintained on the estimated exposed dose. It will be reported to the hygienic experts to assess the effectiveness of the disinfection. If necessary, desired reduction levels or schedules can be adjusted.
In order to verify the effectiveness of the robot, a prototype of a UV-C sensor network has been developed. A single sensor is a micro controller with a UV-C sensitive diode. It measures the light intensity and the total accumulated dose. The measurements are send in real-time to a central log server. Ten sensors have been deployed at dedicated spots in a test room. On average it takes less than 4 minutes for a 20m² room to disinfect COVID-19 by 99.9%. Key factor of this fast performance is the maneuverability of the platform. It allows to keep an as close distance to the surfaces as possible to best exploit the UV-C intensity of the lamps.

Major project results and impact created by the autonomous disinfection including human-detection safety feature based on four RGB cameras:
- UVC dose versus distance characterisation